|
|

| Inleiding |
| Grafische interface Eigen lesprogramma |
| Omschrijving van de software Methode stap voor stap |
| De software |
| TibbLTO (Nostalgisch terugblikje) |
| Victo |
Voordat TibbLTO begon, was de Cintech interface al in gebruik in het onderwijs. In een werkgroep werd toen al gepoogd zoveel mogelijk zinvol lesmateriaal te ontwikkelen. Probleem van die tijd was dat de ene school werkte met Commodore- of P-2000- of enz. en anderen weer met MSX computers.
Elke computer had zijn eigen BASIC versie waardoor de lessen dus niet, of slecht uitwisselbaar waren.
Met de komst van de IBM compatible PC was i.i.g. de standaard gezet. Helaas werden toen ook de werkgroepen opgeheven en daarmee ook de meeste ontwikkelingen stopgezet.
Persoonlijk vind ik de Cintech interface nog steeds zeer toepasbaar in het onderwijs. Helaas zijn, voor zover ik weet, de softwarematige ontwikkelingen niet doorgegaan. Mocht u toepassingen weten die interessant zijn, dan kunt u dat aan mij mailen. Dan zal ik op deze pagina een opmerking daarover, of verwijzing naar, opnemen.
Het eerste besturingsprogramma dat ik voor de Cintech interface geschreven heb was grafisch maar had wel een lage resolutie (320 x 200) en maximaal vier kleuren. Hieronder staat een korte demo...
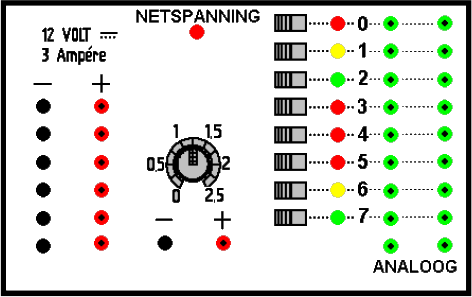
De onderstaande afbeelding van het programma toont een scherm waarmee de in- en uitgangen, gelezen en bestuurd kunnen worden.
Vergeet niet dat interfacing voor de meeste leerlingen iets nieuws is/was. Op bovenstaande manier konden de leerlingen, zonder te programmeren, kennis maken met de aangesloten sensoren en actuatoren.
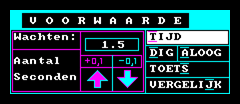
Iets wat ik hoverigens heden ten dage, ondermeer bij de transportband nog steeds toepas.Met de muis kan de interface in STEPPER mode geprogrammeerd worden.
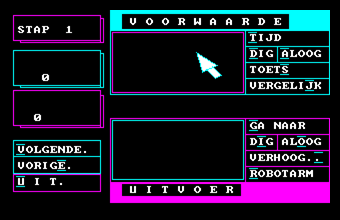
Waarna de voorwaarde (conditie) en uitvoer (actie) gekozen kunnen worden.

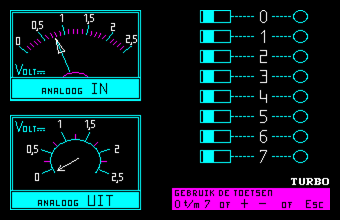
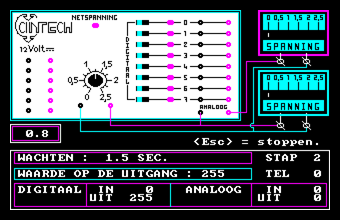
Na het programmeren kan het programma uitgevoerd worden, waarbij op het simulatie scherm ingangen met de muis bediend kunnen. en de in- en in- en uitgangs spanningen grafisch getoond worden.
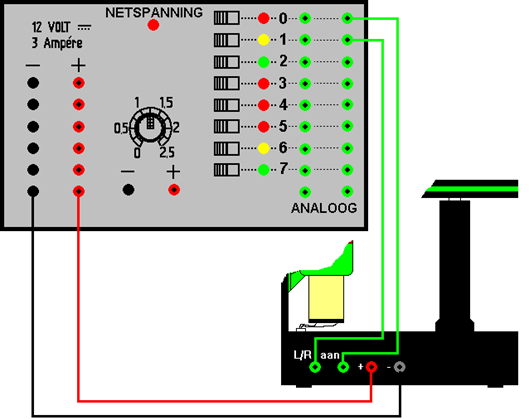
In het programma is ook de besturing voor de Ciento robotarm opgenomen. De Cintech interface kan dus samenwerken met de Ciento.
Het bijbehorende lesmateriaal is hieronder te downloaden.
CINT-II.pdf Docenten handleiding
Omdat het bovenstaande programma in QBasic 4.0 geschreven is, werkt het met DosBOX nog steeds op de hadendaagse Windows computers.
cintrob.zip (Uitpakken, DosBox installeren en starten enz,)
Omschrijving van de software Methode Stap voor Stap
Veel leerlingen hebben moeite met het overtypen van basic programma's omdat ze geen idee hebben wat ze invoeren.
Voorbeeld van wat er fout kan gaan:
40 INPUT "Tik een getal in tussen 75 en 255"; GETAL
wordt door veel leerlingen als volgt ingetypt.
40 INPUT "213"; GETAL
Mag je niet zeggen dat ze niet lezen wat er staat, maar dit was nou ook weer niet de bedoeling.
Ik kan hier erg vrolijk van worden want ik weet dat de leerlingen toch erg hun best hebben gedaan. Naar mijn mening zijn dit soort kleinigheden juist de dingen die ons werk leuk maken.
Om deze problemen te voorkomen zijn de benodigde programma's in een raamwerk opgenomen. Het programma gebruikt de standaard IO poorten en werkt op (nagenoeg) alle voorkomende IBM compatible computers. Omdat het in tekstmode werkt doet de grafische kaart er niet toe. Minimaal beveel ik echter toch een kleuren kaart aan.
Met de muis kan de leerling de benodigde besturingen starten; stoppen en bedienen.
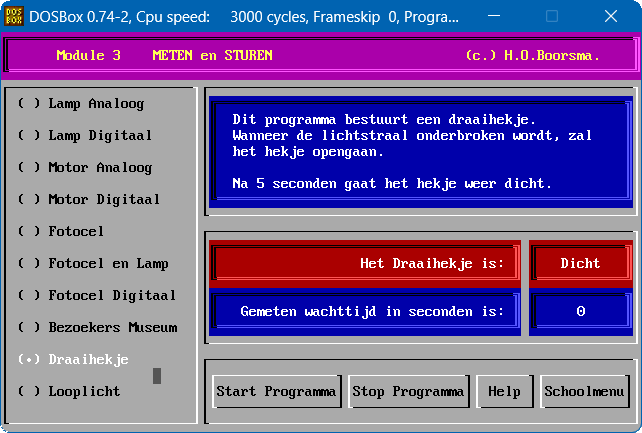
De software Methode Stap voor Stap
De software is gratis en kan hier gedownload (173 kB) worden.
Opgemerkt dient te worden dat deze software alleen onder DOS of DosBox werkt.
De Cintech interface was een van de 8 werkplekken van het TibbLTO lokaal. Onlangs was daar nog een vraag over en heb ik wat lesmateriaal en documenten gescand en online geplaatst.
In hoeverre Victo Tibblto zal verdringen is mij niet helemaal duidelijk. Wanneer men de Tibblto werkplekken goed onderhouden heeft, zijn daarvan een aantal werkplekken direct inzetbaar in het Victo project.
Zeker wanneer u bedenkt dat Victo 10 werkplekken heeft en u misschien wel 28 leerlingen in uw lokaal dient te ontvangen.Met meer werkplekken kunt u ook zoveel mogelijk aansluiten op de behoefte van de leerlingen. Zo kan een bouwkunde leerling een andere groep werkplekken afwerken dan bijvoorbeeld een metaal of elektro leerling.
De verkeerslichten en de booreenheid kunnen vrij eenvoudig toegepast worden. Zelf zie ik ook veel mogelijkheden voor een samenwerking tussen de Cintech interface en de robotarm. In het verleden is er al een programma geweest die beide gelijktijdig aan kon sturen. Hiermee was het mogelijk de robotarm blokjes te laten sorteren op bijvoorbeeld elektrisch geleidend vermogen.